 |
 |
||
| HOME > �Z�~�i�[�E�u����Љ� > �u�Y�w���𗬁v�u����E�𗬉� | |||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
 �����̃��{�b�g�u�[���ɂ��A���B�͕�C�x���g��ʂ��ă��{�b�g��ڂɂ���@������Ă��܂����A���B�̐����̏�Ń��{�b�g�����p�����Ă����͏��Ȃ��悤�Ɏv���܂��B���p���̂��߂ɂ́A���{�b�g������̔��f�ŖړI�n�܂ňړ�����u�����ړ��v����������K�v������A���̂��߂ɂ̓��{�b�g�����s���Ɏ���̈ʒu�𐄒�ł��Ȃ��Ă͂����܂���B�����̌����ł́A�ڈ�ƂȂ郉���h�}�[�N��ݒu���đ��s���Ɍ��m�����@��AGPS ��p���Ē��ڎ���̈ʒu��m����@����Ă���Ă��܂����A�����h�}�[�N�̐ݒu�̎�Ԃ�d�g�̎�M���x�̖��ȂǁA�������ɂ����ăN���A���ׂ��ۑ�͑�������܂��B����A���{�b�g�������ړ����邽�߂̎��Ȉʒu�̐���ɒ��ڂ��āA����܂łɍs���Ă�����@�ɂ��ďЉ�܂��B���܂܂Ō����J�����Ă�����@�̈�ŁA���p���ɂȂ���Ɗm�M���Ă�����̂��A������ꏊ�ɑ��݂���u����v�ɒ��ڂ�����@�ł��B�����p�������{�b�g�̑��s����Ƃ��Ă͕��ʂ�p�������{�b�g�̑��s���䂪��ʓI�ł����A���ʂ͌��ނ�z�ǂȂǂ̎����̂̉e���ɂ��덷�������邽�߁A�����������肵�Ď������s�����邱�Ƃ͍���ł��B���̌덷�̌����ƂȂ�c�����ꂻ�̂��̂����C�̃����h�}�[�N�Ƃ��Ċ��p������̂ł��B�u���ł́A�{��@�̏ڍׂɂ��Đ�������ƂƂ��ɁA���ۂ�1 �q���̋������������s�������J�����̗l�q�������ďЉ�����܂��B
�����̃��{�b�g�u�[���ɂ��A���B�͕�C�x���g��ʂ��ă��{�b�g��ڂɂ���@������Ă��܂����A���B�̐����̏�Ń��{�b�g�����p�����Ă����͏��Ȃ��悤�Ɏv���܂��B���p���̂��߂ɂ́A���{�b�g������̔��f�ŖړI�n�܂ňړ�����u�����ړ��v����������K�v������A���̂��߂ɂ̓��{�b�g�����s���Ɏ���̈ʒu�𐄒�ł��Ȃ��Ă͂����܂���B�����̌����ł́A�ڈ�ƂȂ郉���h�}�[�N��ݒu���đ��s���Ɍ��m�����@��AGPS ��p���Ē��ڎ���̈ʒu��m����@����Ă���Ă��܂����A�����h�}�[�N�̐ݒu�̎�Ԃ�d�g�̎�M���x�̖��ȂǁA�������ɂ����ăN���A���ׂ��ۑ�͑�������܂��B����A���{�b�g�������ړ����邽�߂̎��Ȉʒu�̐���ɒ��ڂ��āA����܂łɍs���Ă�����@�ɂ��ďЉ�܂��B���܂܂Ō����J�����Ă�����@�̈�ŁA���p���ɂȂ���Ɗm�M���Ă�����̂��A������ꏊ�ɑ��݂���u����v�ɒ��ڂ�����@�ł��B�����p�������{�b�g�̑��s����Ƃ��Ă͕��ʂ�p�������{�b�g�̑��s���䂪��ʓI�ł����A���ʂ͌��ނ�z�ǂȂǂ̎����̂̉e���ɂ��덷�������邽�߁A�����������肵�Ď������s�����邱�Ƃ͍���ł��B���̌덷�̌����ƂȂ�c�����ꂻ�̂��̂����C�̃����h�}�[�N�Ƃ��Ċ��p������̂ł��B�u���ł́A�{��@�̏ڍׂɂ��Đ�������ƂƂ��ɁA���ۂ�1 �q���̋������������s�������J�����̗l�q�������ďЉ�����܂��B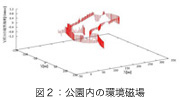


 ���w�Z���Ƃ̐ϋɓI�Ȍ𗬂�}�邽�߂ɂ��A���Ќ𗬉�܂ł��o�ȉ������B
���w�Z���Ƃ̐ϋɓI�Ȍ𗬂�}�邽�߂ɂ��A���Ќ𗬉�܂ł��o�ȉ������BCopyright (C) 2003 Shimizu incubate & promote newindustry organization., All Right Reserved.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
�@ Copyright (C) 2003 Shimizu incubate & promote newindustry organization., All Right Reserved. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||