第88回(平成26年度第3回)産学官交流のご案内を致します。 今回は静岡県立大学にご協力いただき、下記内容の講演を開催します。是非この機会に大学関係者・講演者と交流され、今後の事業活動等にお役立ていただきますようご案内申し上げます。
静岡大学
最先端の切削加工と情報処理・制御」に関する研究
講演1 『 超硬合金の精密切削加工 』
静岡大学 大学院工学研究科 機械工学専攻 助教 静弘生氏
若林 敬二氏
Keywords:超硬合金、切削加工、生産加工、製造 生産加工分野において金型の寿命は製造コストに大きく影響を及ぼすことから、より金型性能が高く型寿命の長い金型材料が必要である。そこで近年、多くの機械的特性に優れるとともに超硬合金を金型材料として用いることが注目されている。 一般的に、超硬合金は放電加工により製作される。しかしながら、放電加工では加工時間が非常に長いことや加工変質層の生成などの問題がある。 このことから、放電加工後に磨き工程により加工変質層を除去する必要が生じる。
しかしながら超硬合金は非常に高硬度であることから工具の損傷が著しく切削加工は極めて困難である。 本講演では、ダイヤモンド工具を用いた超硬合金の切削加工に関して特徴や問題点を紹介するとともに、その対応と改善策について研究事例を交えて講演する。また、放電加工と切削加工を効率よく適用することによる生産性の改善策等についても紹介する。
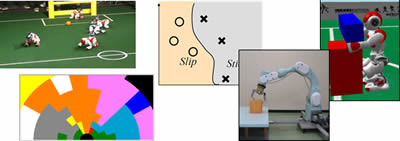
講演2『 不確実さと最適性を考慮したセンサ情報処理と制御 』
静岡大学 大学院工学研究科 機械工学専攻 准教授 小林 祐一 氏
Keywords:制御、ロボット、機械学習、行動設計 正確なモデルを構築することが難しい制御問題、ノイズや不確実性の大きい観測・推定・識別問題に対応するための認識と制御の方法をロボットへの適用例を通じて紹介する。 最適制御の数値解法の適用例では、大きい観測誤差や運動の誤差に対処しながら最適な手順で行動を決定する手法を開発し、四脚ロボットのサッカー行動設計に適用した。 人手の試行錯誤による設計では得られない解が、自動的に得られることが本手法の利点である。 また、未知の要因が多いが、構造をある程度知っているような制御問題で未知要因に対応するための制御方法の研究も行っている。機械と物体との間の接触(滑り・非滑り)に関するモデルが正確に推定できない場合に、パタン分類学習・統計処理などの機械学習法と運動計画・最適制御法を組み合わせることで、実世界とモデルとの間のずれに対処することが可能になる。その例として、アーム型ロボット、ヒューマノイドロボットによる物体操作(滑り・転がりなどを含む動作)問題への適用例を紹介する。





 ※大学側との積極的な交流を図るためにも、ぜひ交流会までご出席下さい。
※大学側との積極的な交流を図るためにも、ぜひ交流会までご出席下さい。